12/VII/2006
Conference day three: the insider view of AI
Or how people working on AI views AI.
The conference day was divided in two main blocks, entitled The insider view of AI Part 1 and Part 2 and a poster session. As an additional event, a robot demonstration was prepared for the general public at the end of the day, which repeated on a popular way the demonstration made on the first day.
The first block was composed of three speeches.
His talk was entitled Intelligent Systems as Mediators in Human Communication and the subject was multilingual communication by using automatic translators.
He started talking about human-computer interfaces which at present are basically the keyboard and the mouse. But human communication is very rich, so a computer requires the attention of the human. Is that requirement that limits the communication between human and computer. So the goal is having a machine that seats beside us and listens and understands a human communication and how people interact with other people.
In order to have that, a lot of things are needed. First a number of implicit information. Then a lot of different capabilities in verbal and visual form that allows them to obtain the key information of the communication, answered by the questions who, what, where, why and how.
He pointed out that at present, there is a challenge when trying to provide access to everybody to the global markets and opportunities, while maintaining the cultural diversity. This could be achieved by using machine translations. He showed then some speech translation systems of the past which were very limited and some other of current time that work more or less in specific domains.
But what makes this problem so hard?. The answer is that language is ambiguous at all levels (semantic, syntax and phonetic levels). In order to solve this problem he proposes as a solution to model uncertainty statistically, by creating and maintaining a list of hypotheses and hope of possible translations for the current sentence. This list is populated based on other knowledge coming from other systems. He did a demo with a PDA that translated into Spanish using this mechanism.
However this more or less successful demonstration, he agreed that there is still a lot of missing science.
* Problem n.1: the domain of translation is still limited
In order to have unlimited speech-translation which requires an open domain, vocabulary and speaking style, they developed statistical learning algorithms, learn speech and translation mapping from large corpora and use data from the internet. The results are quite good (he showed how this system work by applying it to a video of the european parlament, and making its translation offline).
* Problem n.2: translation delivery has to be appropriate for the situation
Translation has to allow for fluent communication, keep up with input speech, minimize delay (do it in real time), not interfere with human tasks, not create disturbances with other systems and make the language barrier transparent.
He showed some technologies addressed to this issue. One consisted of some glasses that present to the eyes the translated text. Another is a EMG translator (this is a system that connects via electrodes to the face of a person and recognizes what he is saying by 'reading' the lips movements and translates into any other language in voice).
All the presentation was done with an in vivo demo of a system that was automatically translating what the speaker was saying into Spanish. Very impressive even that it had some mistakes.

Alex Waibel (to the right) showing the real time translator of the conference into Spanish
Then he went through a very quick list of interesting projects based on what people do when talking. Too quickly!!!. One of those was a database they are doing by recording meetings at several universities around the world, and how they label it to be used for tracking people and speech recognition. The information extracted from those analysis could be used to improve the speech recognition.
Finally he showed all a bunch of technologies developed for answering the original questions : who,what, where, why and how (very interesting but very quick presentation)
Winning the DARPA Grand Challenge.
His speech described the DARPA Grand Challenge, a 50 mile off-road robot race across the Mojave desert. No drive, no remote control. Basically he described how they constructed the vehicle that won the challenge.
He made first a presentation of the problem, the team and the vehicle. Then, a description of the GPS system that decided the route. Then a description of the laser system used to find obstacles in the way. Then the vision system to find the road (based on optical flow). And finally the speed control.
After showing how they won on a series of funny videos, he went for the motivations about why to create those type of robots. Apart from military purposes, he advocated for life safety, to make people more productive, improve quality of life of aging population, increase highway throughput and change urban real-estate.
His last statement was to points to the next challenge they are going to participate: The Darpa urban challenge, were a robot must drive through a highway and reach a point on a real street.
Artificial intelligence and the origins of symbolic culture.

Luc Steels
He started his speech by dividing the possible paths for the generation of AI into three groups:
1- AI through design: achieve intelligence by building it, modeled after (natural) intelligence.
2- AI through imitation: achieve intelligence by applying (statistical) learning to products of (natural)intelligence. This is the machine learning approach.
3- Self-generated AI: achieve intelligence by orchestrating processes that generate it.
The challenge for him is to answer the following question: is it possible to build embodied artificial agents capable of organizing a symbolic communication system without human intervention?. In order to answer this question, the key idea to develop is what is meaning and were it comes from.
So he describes the challenges as:
- Embodiment: communication about real world perceived/acted upon through agent's sensory-motor system
- Agents should also share ontologies
This can be interesting because it can help solving the grounding problem, self-generated intelligence and understand the origins of human language and symbolic culture.
So what about symbolic culture?.
There is a whole system of beliefs. It is the ability to create representations. Giving symbolic meaning to common objects. Everybody can participate in creating new symbolic systems. Is this ability to invent and propagate symbolic systems that will produce a symbolic culture.
Based on this description of symbolic culture, he explained his language games, applied to the generation of symbolic meaning in populations of robots. The main characteristics are:
- There is a population of embodied agents
- They are on a shared situation
- They have a joint attention framework, it is, they share a common goal, have a joint attention and have feedback on success or failure
- They are on an interacting scenario
Having all that, Steels asks himself why and how can agents build up an ontology + lexicon for spatial distinctions?. Why and how can they adopt a perspective?.
Then he described his language game setup, pointing out that the interesting thing is that the robots do not have a conceptual system but they create their own one. He showed how the robots can coordinate in order to obtain a general language, and how they agree, by means of a auto-organization system, in the words to be used. He showed that this mechanism and setup works when all the agents have the same vision of the situation, but not when each one has its own vision.
What is missing is perspective. He introduced an element into the game system that implemented the perspective mechanism, allowing the agents to increase its success rate. Basically what it did was to assume that, what the speaker is saying is said from the speaker's perspective when there is an error in communication when it has been assumed that the speaker talked from my perspective.
He sees language as a a complex adaptive system. It is dynamically constructed and adapted by the language users. Agents use invention, they learn it by intentional learning (by trying to guess meanings) and alignment, recruitment of mechanisms, and it is composed of forces that maximize communication success, and minimize cognitive effort.
Then he focussed on the emergence of grammar. Grammar is necessary in order to cope with ambiguity and to build constructions by introducing syntactic and semantic categories, and specifying how to combine them. He decomposed this problem on three sub-problems:
- Compositionality: or how to go from simple utterances to multi-world.
- Grammatical: or how to combine meaning of world into a larger whole.
- Syntactic: or how to use syntactic features to constraint application.
He explained his system developed to achieve all of it, which basically consists on a recurrent search for the creation of rules. His system included syntax in order to introduce constraints in the combinatorial explosion. His results showed that the communication success increased with his system of grammar + syntax when ambiguity entered into the picture.
====================
The poster session was divided into two days (today and tomorrow). A total of 81 posters were presented during those two days covering different aspects of AI.
Preparing the poster session

During the poster session
===================
He is an expert on evolutionary and adaptive behaviors in robots.
With a talk entitled Get a live! he talked about the motives, particularities and future of AI. Why do we need AI?. Why not only logic and computer science, biology, neuroscience, neuroethology, control theory and material science?. Possibly because people are interested in the general universal principles underlying intelligence.
He drawn different motives for different people in AI: technology (tools for humans use), cognitive scientist (for understanding of natural systems), philosophers (philosophy of mind). And also divided intelligence into two groups: specifically human intelligence, and non-human intelligence.

Inman Harvey and his speech outline
He identified language and abstract reasoning as one of the major transitions of evolution. However, he wisely pointed that other animals display adaptive behavior, perception, vision, social coordination, etc without using language or abstract reasoning. On top of that, he suggested that it is a bad idea (perverse) to try to think that human do things in the same way as computers do.
Having said that, he started the history of AI and automata. At all times, people used the technology of that time as a metaphor of how the brain works. Also he paid attention to the fact of how the word computation has changed its meaning through the history. He continued revisiting history, and made a special attention to the concept of time. He stated that time has not been taken into account when doing AI. This though leaded to the dynamical systems approach to AI.
He quickly addressed then a list of issues that he thinks need to be deeply studied:
- Emotional intelligence.
- The role of dirt, i.e. using real robots because real world has a lot of dirt.
- Circular causation, i.e. instead of finding a firm foundation to explain a problem, why not to make invariants of a self-maintaining process.
- Autopoiesis. An organism is an organized flow of materials and energy, in space and time, that maintains itself. It is the ultimate homeostasis.
- Homeostasis as a resistance to change. Rein control states that when an essential variable in a biological system is regulated against being too high or too low, this regulation is never done by a single system.
- Embodiment.
- Gaia theory and Daisy world. The hypothesis that the earth is an organism that auto-regulates around values comfortable for biological systems.
As a conclusion, he thinks that real advances will be done in areas beyond our current horizons.
Designs principles for emergent cooperation and communication in robotic swarms

Dario Floreano starting his speech
His talk was about collective behavior in robots. Is not easy to obtain collective behavior in robots, since usually we get interferences. He defined altruistic cooperation: cost for the individual, benefit for the colony. Only when we have altruism, cooperation can emerge. So how does altruism arose in nature? Under which conditions can we have a colony of robots where they pay a cost in order to benefit the ensemble?. This is the subject of his talk.
He suggested that altruistic cooperation could emerge when there exists kin selection. Kin selection is composed of genetic relatedness (if my genes are not going to be reproduced, then may be my companion's will) and group selection (more competition for the individual outside the colony than inside the colony)
So he tries to evolve cooperation by implementing kin selection on a population of robots. He did it by creating four different experiments with different ways of selection (selecting by individual or by colony, with different levels of relatedness). Whenever you have clones of robots (same gene) and evolve them under a situation where cooperation can evolve, then it will evolve cooperation, and the number of selfish individuals will decrease. So in order to have cooperation, the robots must have the same gene.
In cooperative robotics we can find robots that are autonomous but may cooperate with others, or robots that individually have a little mobility but when connected with others, then they can achieve things as a single entity.
So he created a type of circular robot with lots of sensors, and tested on some tasks where one single robot could not do, a group of them can. He showed videos of teams of robots passing a step, saving a whole in the ground or cooperating to transport an heavy object.
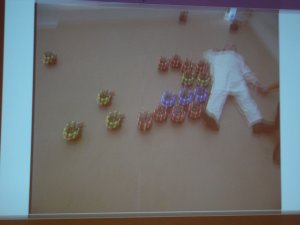
The small robots start to organize
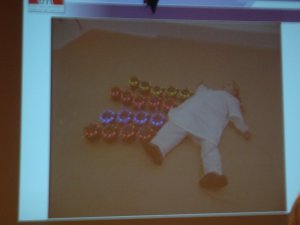
Once organized, they cooperate to move the heavy object (a children that felt down)
Then he moved to the emergence of communication: he sees communication as an act of cooperation. He finally showed the results obtained were communication evolved on a homogeneous colony.
Note: it may happen that the text contain errors. Please contact me if you find any error, since I will be able to fix it.