Overview
Legged humanoid robots face a big problem when trying to move autonomously on an indoor environment. Up to date, most of approaches have focused on using vision to persom such behavior. However, those approaches are still on its infance and do not allow the robot to move on real environments without crashing with obstacles.
In this work, we are using classical techniques based on laser and odometry to successfully achieve the complete suite of navigation abilities: mapping, localization, path planning and obstacle avoidance.
Motivation
The main motivation for this research is to deploy a humanoid service robot on a home environment. A strong navigation system will allow the robot move on the environment and help people inside.
Method
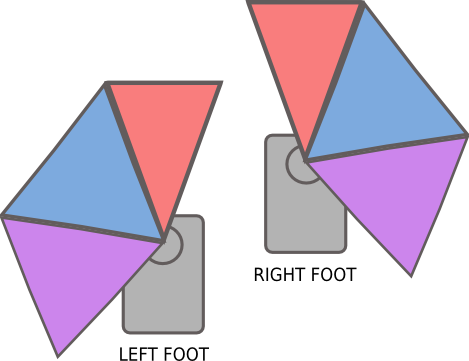
For the laser data, we use two small lasers on each feet of the robot. The odometry is obtained by an inverse kinematic computation of the walking algorithm.

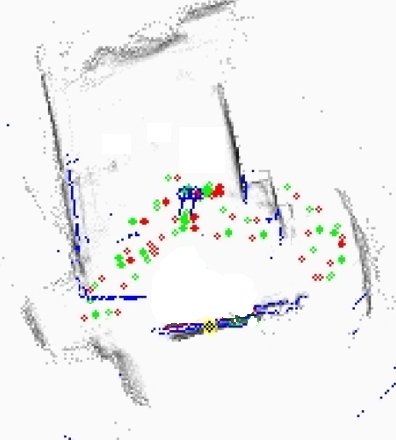
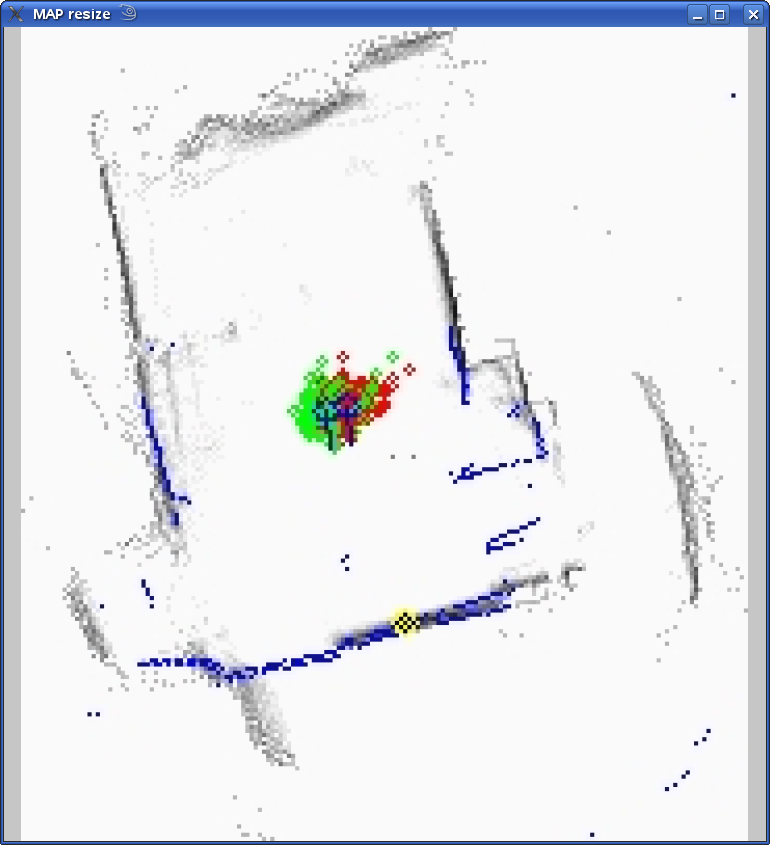
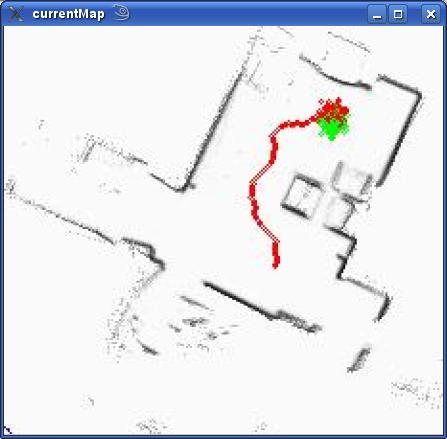
Localization and mapping abilities of the robot are based on the use of particle filters, based on the DP-SLAM algorithm for path planning, and MonteCarlo particle filter for localization. Path planning uses the A* algorithm to calculate trajectories, and the obstacle avoidance is based on a potential field implementation.
Results
We applied the method to a human tall legged humanoid robot Reem-B.
The results obtained can be seen on the following video.