News
[31-XII-2007] Linbot page transfered from Sourceforge to Ouroboros
For some unknown reason, the Linbot page at Sourceforge has been deleted. I decided to move the page to my own server at Ouroboros.org and re-start the project with a more professional perspective in mind. Stay tuned for big changes, but don't expect any news until mid 2008.
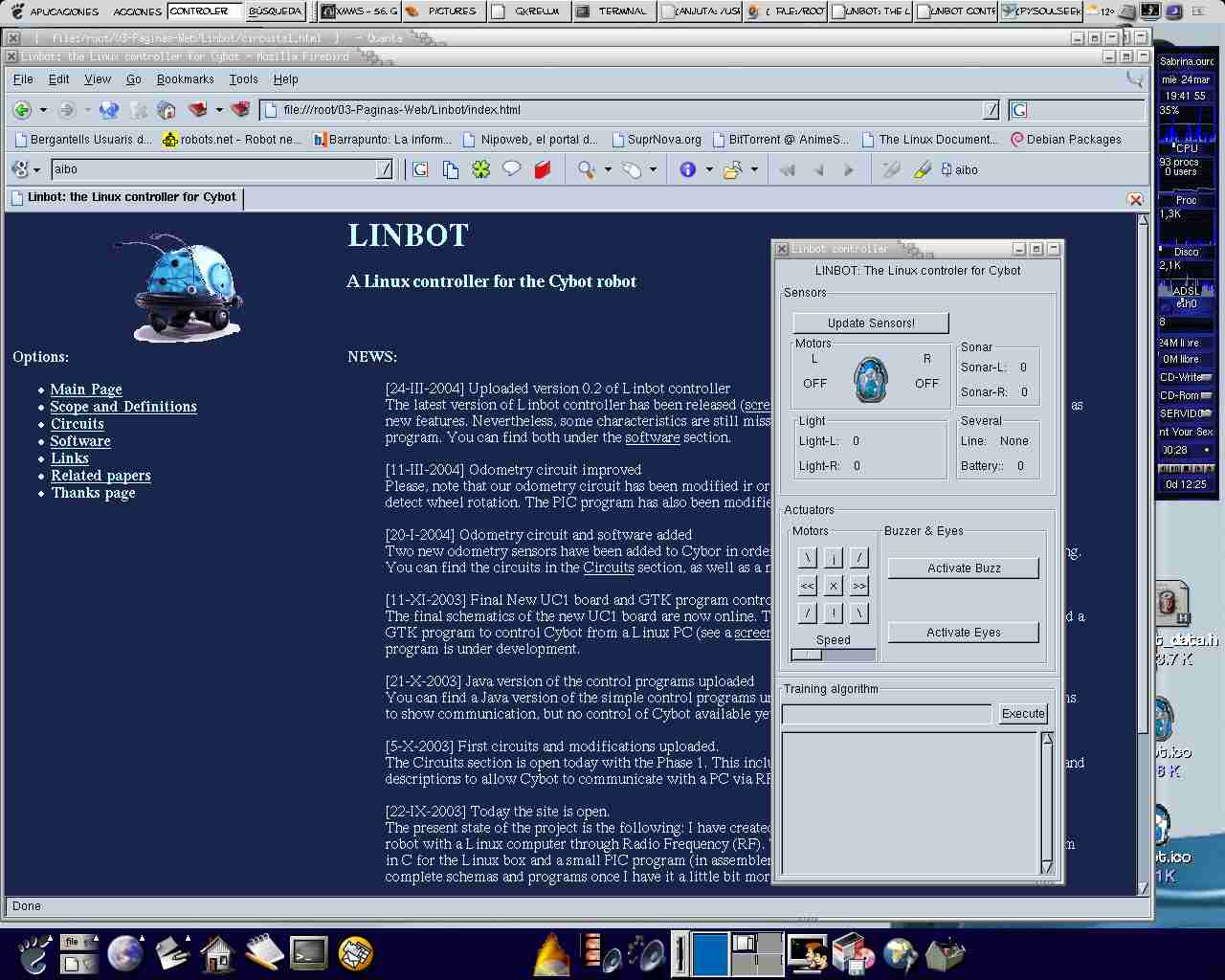
[24-III-2004] Uploaded version 0.2 of Linbot controller
The latest version of Linbot controller has been released (screenshot)
. It has some look modifications as well as new features.
Nevertheless, some characteristics are still missing.It requires version 0.2 of the PIC controller program.
You can find both under the software section.
{kind=link}
[11-III-2004] Odometry circuit improved
Please, note that our odometry circuit has been modified ir order to filter interferences that didn't
allow to detect wheel rotation. The PIC program has also been modified.
[20-I-2004] Odometry circuit and software added
Two new odometry sensors have been added to Cybor in order to allow him sense when his wheels are rotating.
You can find the circuits in the Circuits section, as well as a modification for the PIC software.
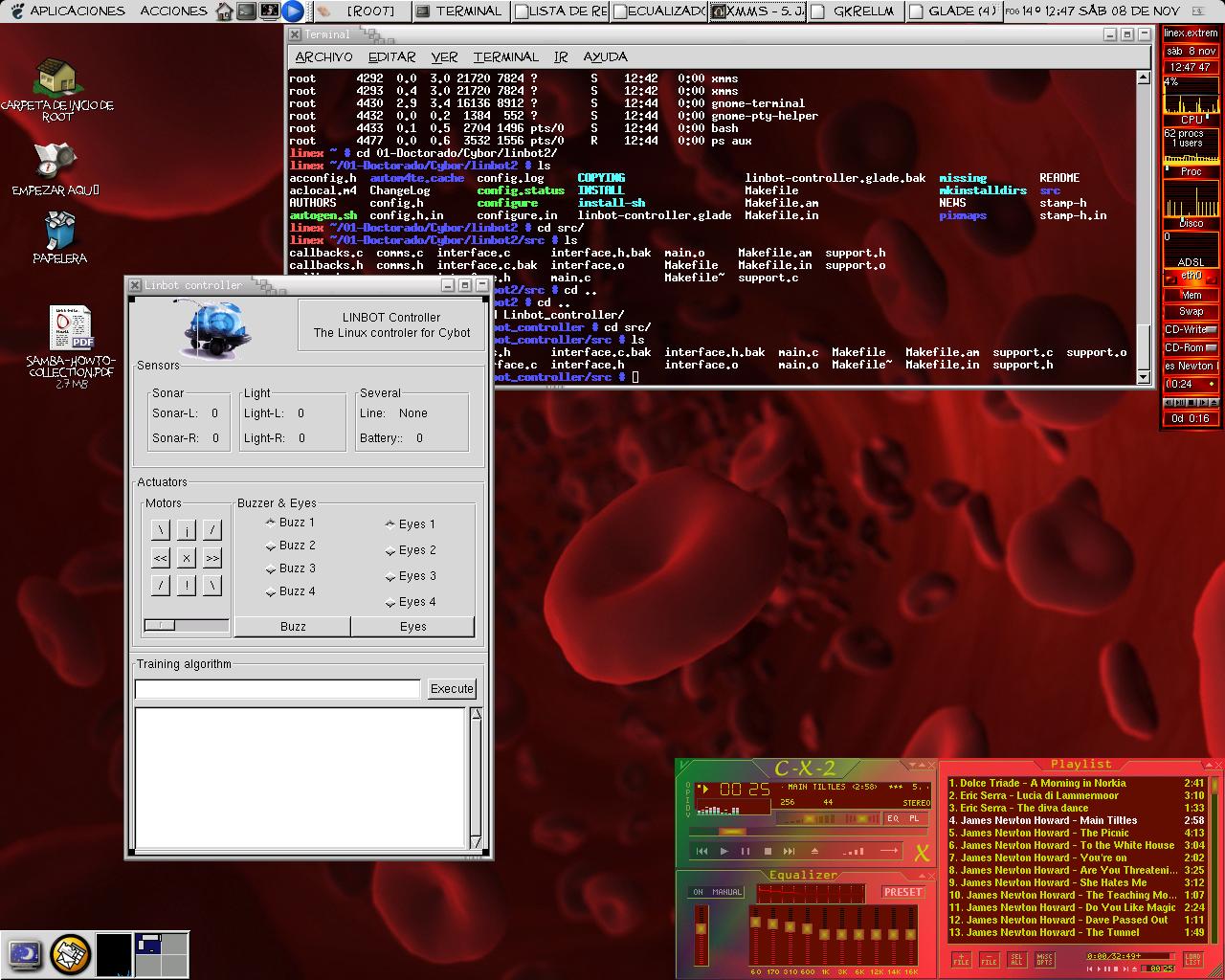
[11-XI-2003] Final New UC1 board and GTK program control uploaded
The final schematics of the new UC1 board are now online. This includes
the code for the uC of the board and a GTK program to control Cybot from
a Linux PC (see a screenshot).
The (multiplatform) Java version of this program is under development.
{kind=link}
[21-X-2003] Java version of the control programs uploaded
You can find a Java version of the simple control programs under our sourceforge
CVS. Still simple programs to show communication, but no control of Cybot
available yet.
[5-X-2003] First circuits and modifications uploaded.
The Circuits section is open today with the Phase 1. This includes some
electronic boards designs, programs and descriptions to allow Cybot to
communicate with a PC via RF. Still a first version but working.
[22-IX-2003] Today the site is open.
The present state of the project is the following: I have created
the electronics for communicating the Cybot robot with a Linux computer
through Radio Frequency (RF). This includes the circuit boards, a small
program in C for the Linux box and a small PIC program (in assembler)
for the PIC in the robot. I will release the complete schemas and programs
once I have it a little bit more stable (planned by the end of September).