Overview
The use of modular approaches to autonomous agent control
tries to overcome complexity at the moment of generate complex agent
controllers. However, those approaches are mainly based on a division
at the level of
the task, it is, the global task (or behavior) that the agent must perform is divided
in a group of simpler sub-tasks (or sub-behaviors), and the final solution generated as the
combination of the solutions of each of those sub-tasks. In this approach
two main basic implementations dominate: the ensembles and the mixture of experts.
In this research, we present a new view on how to generate modularity, which is compatible with already existing modular approaches like ensembles or mixture of experts. We introduce the modularity at the level of device.
Motivation
The motivation behind this research is the generation of a bottom-up architecture based on neural networks that is capable of controlling complex robots, and make them perform complex tasks. This web page introduces a characterization of the architecture developed for this goal, and shows its performance on a simple Khepera robot equipped with a gripper. For a more complex application on a more complex robot, see our results on dynamic gaits with the Aibo robot.
Definitions
We define strategic modularity, as the modular approach that identifies which
sub-tasks are required for an autonomous agent in order to perform a global task.
In contrast, we define tactical modularity as the one that creates the
sub-modules required to implement a given sub-task. In contrast with strategic
modularity, tactical modularity must be implemented for each sub-task by using
the actual devices that make the robot act and sense, these are, its sensors
and actuators. In tactical modularity subdivision is performed at the level
of the physical elements that are actually involved in the accomplishment
of the sub-task.
Method
Tactical modularity should create modularity at the level of the robot
devices which have to implement a required behaviour. It means that, once a sub-behaviour
required for the animat has been decided, tactical modularity has to
implement it using the sensors and actuators at hands. In this paper,
we implement tactical modularity by using our architecture called DAIM
(Distributed Architecture for Internal Modeling). This architecture implements
tactical modularity by creating a completely distributed
controller composed of small processing modules around each of the
robot sensor and actuator. We call those modules intelligent hardware
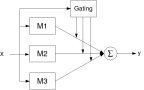
unit (IHU) and its schematics is shown in the following figure.
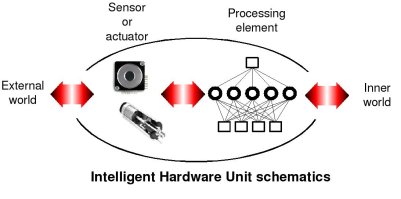
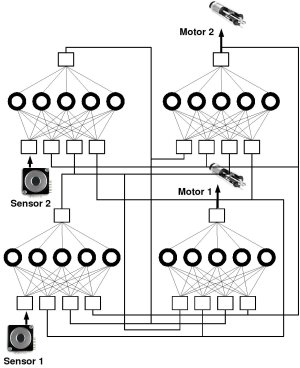
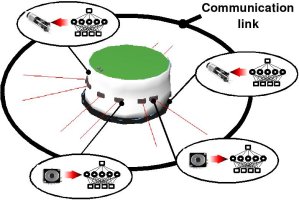
Every IHU is composed of a sensor or an actuator and an artificial neural network that processes the information of its associated device (received sensor information for sensors, commands sent to the actuator for actuators). All IHUs are interconnected to each other in order to be aware of what the other IHUs are doing. The following figure shows its application to a simple robotic system with two sensors and two actuators, and the video shows the results obtained when that architecture is applied to the robot in order to make it orbit around a central object.
Through the use of a neuro-evolutionary algorithm, IHU modules learn how to cooperate and coordinate between them, and how to control its associated element, allowing the whole robot to perform the sub-behaviour required. The algorithm selected is the ESP (Enforced Sub-Populations) by Gómez and Miikkulainen, which has been proved to produce good results on distributed controllers.
Test-Bed
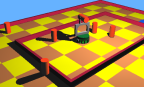
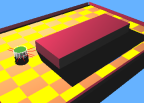
As a test-bed we selected the garbage collector problem for a Khepera robot. This is a problem where a robot (the Khepera) is equipped with a gripper, and placed on an arena. Inside the arena, there are sticks that need to be released outside the arena by the robot. So the robot must avoid the walls and look for the sticks. Once it has detected a stick and classified it as such, then it has to pick it up, move towards a wall, and release it outside the arena.
It has to be noticed that the behavior of the robot has to change completely depending on the value of a sensor (the gripper sensor): in one case, when not carrying the stick, the robot has to avoid walls and approach sticks, and in the other case, when carrying a stick, the robot has to avoid sticks and approach walls.
When applying the DAIM architecture to the khepera robot, we need 11 IHUs, six for the IR sensors, one for the gripper sensor, two for the motors, and two for the take and release procedures.
Results
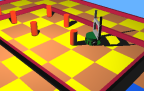
The following video shows the behavior obtained with the DAIM architecture
with 11 IHUs
The results obtained were compared with other neural architectures in order to benchmark our architecture in relation with others. Those included, a monolithic neural controller, a two strategic modules architecture, and an emergent modular architecture. Even that the behaviors showed by all architectures were very similar, results showed that emergent modular and DAIM obtained higher scores in terms of correctness of the tasks (less errors performed).
On top of that, DAIM architecture has the special feature of creating an internal world for the robot that allows it to correctly categorize its current sensory-motor flow into a few of possible states. Furthermore, this state, represented by the outputs of the IHU sensors is directly accessible and observable from an external point of view. The internal state can be checked by an external observer, or used by an upper layer of control to perform deliberative tasks. In some sense, this internal world is like an event extractor.
Webots Source Code
You can test this result on your Webots simulator by using the code released
here. This code contains the Webots world for the garbage
collector problem, as well as the distributed neural controllers obtained
by the neuro evolutionary process.
Related publications
R. Téllez, and C. Angulo, Embodying cognitive abilities: categorization, , in the 9th International Work-Conference on Artificial Neural Networks (IWANN'2007). Published in Lecture Notes in Computer Science, Volume 4507, p 781-788, 2007.
R. Téllez and C. Angulo, Acquisition of meaning through distributed robot control, in the Proceedings of the ICRA workshop Semantic Information in Robotics, Rome, 2007
R. Téllez and C. Angulo, A tactical approach to distributed agent control, Adaptive Behavior, submitted.
R. Téllez and C. Angulo, Tactical modularity for evolutionary animats, in the Proceedings of the 9th International Conference of the Catalan Association for Artificial Intelligence, Perpignan, 2006