Autonomous humanoid navigation
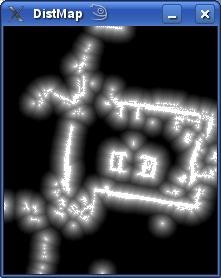 |
We present a novel approach to legged humanoid navigation on indoor environments using classical probabilistic SLAM methods based on odometry information and laser measurements. Navigation skills include mapping, localization and path planning with obstacle avoidance. The whole process is performed within the robot itself.Results are presented for the 1.5 m tall Reem-B humanoid robot. |
Towards an experience-based artificial intelligence
 |
Certain theories of cognitive development, of the evolution of cognition, and of knowledge representation have indicated that the episode is a central element to understand the first stages of cognitive development, as well as of certain basic cognitive abilities, such as intelligent behavior. Developing these approaches, we introduce the experion theory of cognition and we set the future lines of research for applying this theory to the generation of artificial intelligence. |
Strategic and tactical modularity for evolutionary animats
 |
In this research activity, I define the concepts of strategic and tactical modularity in distributed neural controllers, and I apply them for the control of a Khepera robot solving the garbage collector problem. Results are compared with other neural architectures, and I present a study about how each distributed controller learns to control its associated device, and how it coordinates with the other controllers. |
Generation of dynamic gaits in real Aibo using distributed neural networks
 |
This is part of the main research of my PhD. In this work, we develop a neural architecture capable of generating dynamic gaits on Aibo. We use simulator and the real robot. The control architecture is 100% made of neural nets (no had-coded walking algorithm is used), and we take inspiration from biology, using the concept of Central Pattern Generator. |
Started: 12/IX/2003 - Closed: 27/III/2004 - Re-open: 31/XII/2007
Linbot project: Linux controller for Cybot robot
 |
This activity adds to a cheap commercial robot, the required functionality for the implementation of evolutionary robotics experiments. This means modifications to the hardware and software of the robot, including adding odometry, wireless connection to a Linux based PC, graphical front-end, new controlling boards, etc. |