PhD. Thesis
Chapter 1: Overview
 |
The opening chapter of this thesis consists of a concise overview of the entire thesis. It succinctly describes the main area of research, the methodology applied, and the results obtained. It also includes a summary of contributions |
Chapter 2: Evolutionary robotics
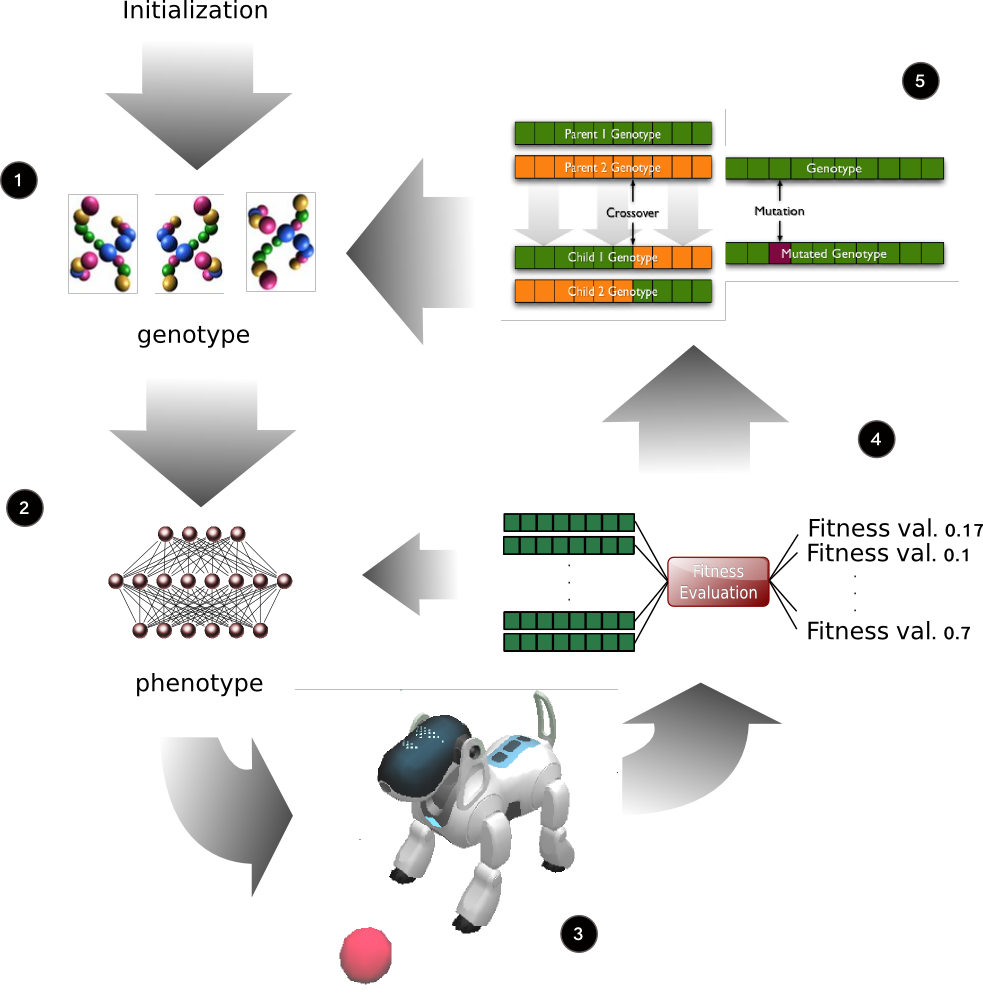 |
This second chapter is an analysis of the selected framework, and is organized as follows: firstly, techniques from the ER approach to be used for ANN training will be described. Then, the limitations of the current ER framework for our particular application will be described, and finally, a solution to the limitations described is proposed. |
Chapter 3: Modularity in robot controllers
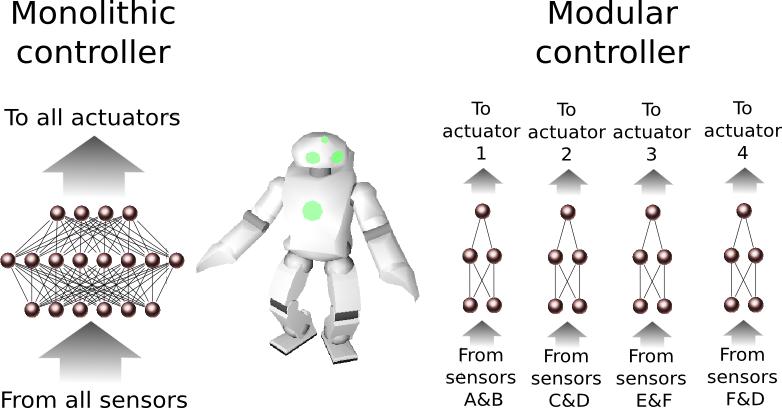 |
This chapter points out that a modular neural controller may be required in order to achieve the evolution of a neural controller in a complex robot solving a complex task. Current state of the art modular neural controllers is then reviewed in order to determine how the proposed architecture should ideally be structured. |
Chapter 4: A distributed modular neural architecture
 |
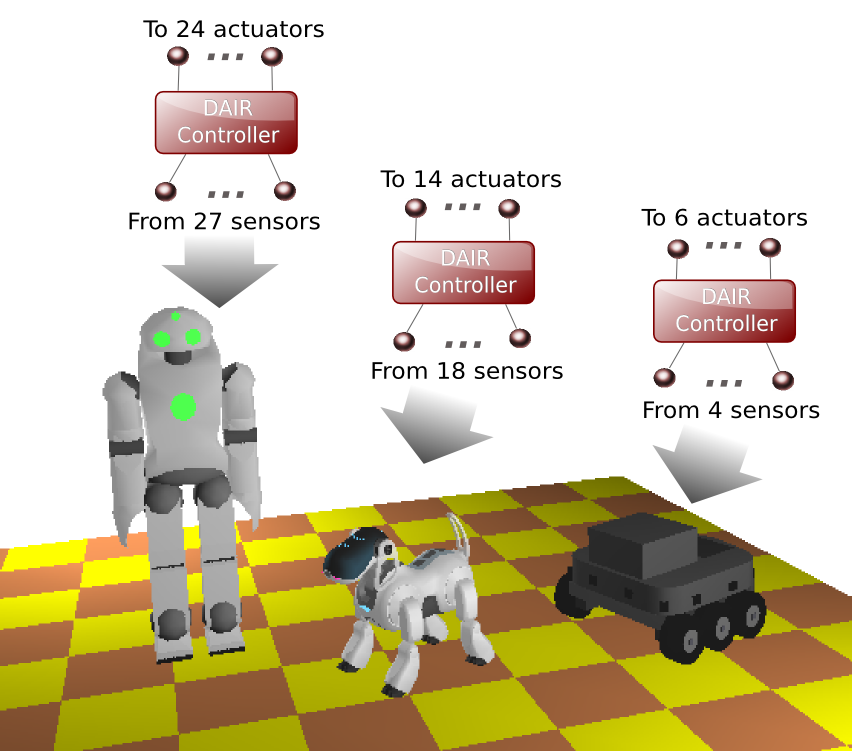
This chapter is devoted to detailing the architecture developed by this research to address the requirements namely, applicable to complex robots, general enough to be applied to any robot and any task, scalable as to the number of robot devices (sensors or actuators) as well as in the number of tasks, able to generate control for an agent with the introduction of the least amount of external knowledge as possible, and that easy integration into the controller should be possible when external knowledge is required . The ideas that drove the devel- opment of the architecture are discussed, as well as their influence in the final version. Finally, several illustrative application examples of both simple and complex robots are given. |
Chapter 5: Benchmarking
 |
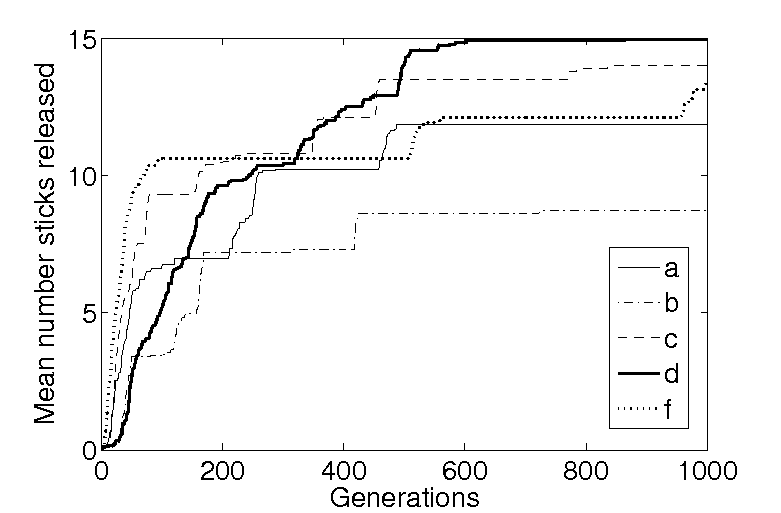
The novel methodology presented in the previous chapter is extensively tested and compared with current approaches in this chapter. Khepera robot simulations are used as test bed. The experiments consist of implementing a DAIR control system for the Khepera robot while it performs a test bed task. The DAIR architectures performance is compared with the results obtained by state of the art neural architectures on the same task. |
Chapter 6: Progressive design through staged evolution
 |
This chapter introduces one of the strengths of this architecture for the evolution of a complex coordination in a complex robot, namely progressive design. With the use of progressive design, the architecture minimizes the drawbacks of large search spaces and the bootstrap problem when evolving a controller for a robot whose body, task and environment are complex and determined beforehand. The main goal in progressive design is the generation of a tactical modular controller in stages. In the same manner as the DAIR architecture describes a modularization of the controller, the DAIR progressive design method provides a modularization of the learning procedure. |
Chapter 7: Adding external influence
 |
This chapter describes how a progressively designed controller can slightly modify its behaviour based on the tonic value of a signal external to the controller. This feature can be useful to tune, or even change, the current behaviour of the controller once it has been completely evolved and installed on the robot. This chapter describes how to integrate this feature into a DAIR controller. An application to the Aibo robot is shown. |
Chapter 8: Inner analysis
 |
This chapter analyzes how IHUs deal with information when they are working on the generation of a behaviour for a robot. What the role of each IHU is in the final robot behaviour will be analyzed , as well as how the IHUs organize and collaborate between each other in order to generate the final global behaviour. |
Chapter 9: Conclusions
 |
This section summarizes the main results of this research. Obtained results are compared to related works. Additional analysis of the results obtained and a discussion about how they can shed some light on different fields of artificial intelligence are also provided. The chapter ends with a list of future related works. |
Web page by R. Téllez using rubric css by Hadley
Wickham
Don't undertake a project unless it is manifestly important and
nearly impossible (Edwin Land)