Overview
This chapter compares the proposed DAIR architecture with already
existing neural architectures. Initially, the architecture is compared
in the garbage collector task with a Khepera robot. Additional
comparisons are made with the Aibo robot.
1st Test-Bed: comparing using simple Khepera robot
As a 1st test-bed we selected the garbage collector problem for a Khepera robot. This is a problem where a robot (the Khepera) is equipped with a gripper, and placed on an arena. Inside the arena, there are sticks that need to be released outside the arena by the robot. So the robot must avoid the walls and look for the sticks. Once it has detected a stick and classified it as such, then it has to pick it up, move towards a wall, and release it outside the arena.
It has to be noticed that the behavior of the robot has to change completely depending on the value of a sensor (the gripper sensor): in one case, when not carrying the stick, the robot has to avoid walls and approach sticks, and in the other case, when carrying a stick, the robot has to avoid sticks and approach walls.
When applying the DAIR architecture to the khepera robot, we need 11 IHUs, six for the IR sensors, one for the gripper sensor, two for the motors, and two for the take and release procedures.
Results
The following video shows the behavior obtained with the DAIR
architecture with 11 IHUs
The results obtained were compared with other neural architectures in order to benchmark our architecture in relation with others. Those are:
- Architecture (a) : monolithic feed-forward architecture with no modularization.
- Architecture (b) : distal strategic modularity. This is a
strategic
modular architecture composed of two strategic modules. - Architecture (c) : emergent
modular architecture, using proximal strategic
modularity.
- Architecture (d) : DAIR architecture using tactical-only modularity.
- Architecture (e) : DAIR architecture using strategic + tactical approach.
- Architecture (f) : tactical approach without sensor IHU’s.
The following figures summarize the results:
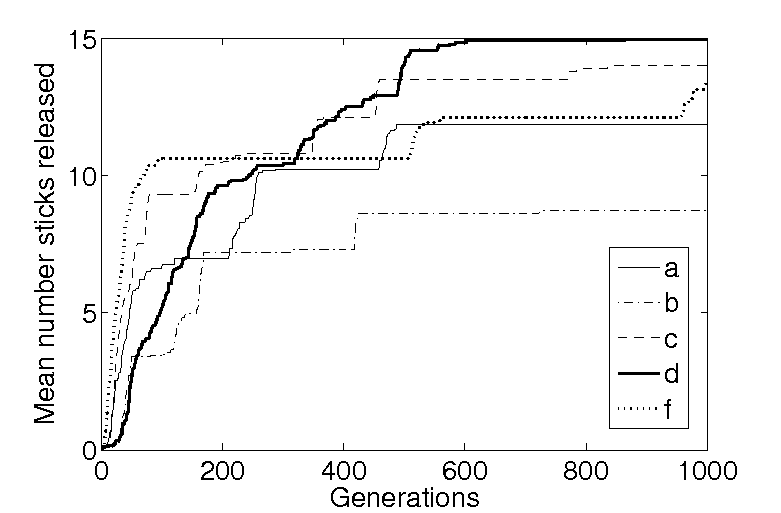
Figure 1: Number of epochs (out of 15) across generations in which individuals
with different architectures (except architecture (e)) correctly picked up and
released a target object outside the arena. Each curve represents the average of
the best individuals in 10 different simulations.
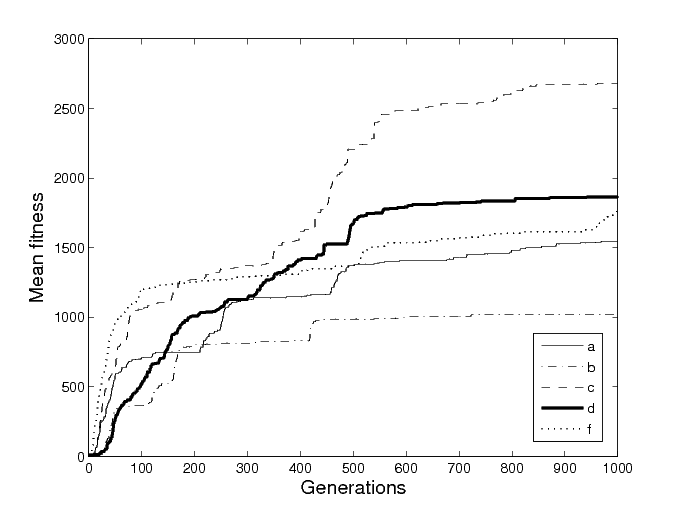
Figure 2: Evolution of fitness when the extra game with five sticks is added.
Results averaged out over 10 evolutionary runs.
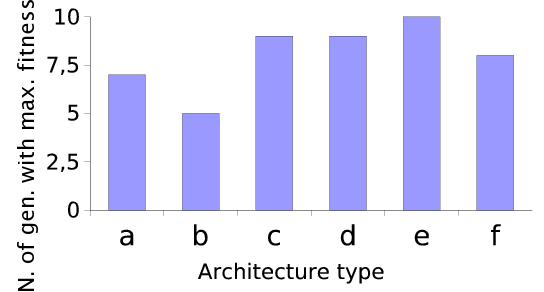
Figure 3: Number of times out of 10 that each architecture was able to
reach
maximum fitness.
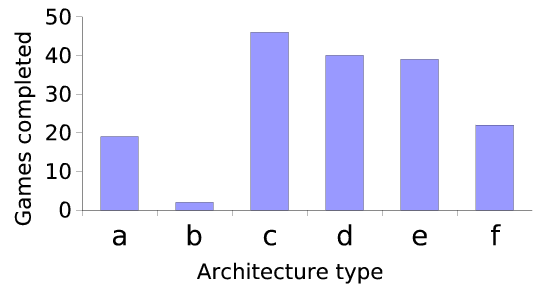
Figure 4: Maximum consecutive number of times that each architecture
completed
a game of releasing the five sticks outside the arena without making an
error.
Webots Source Code for garbage collector
You can test this result on your Webots simulator by using the code
released here. This
code contains the Webots world for the garbage collector problem, as
well as the distributed neural controllers obtained by the neuro
evolutionary process.
2nd test-bed: comparing using complex Aibo robot
In an additional set of experiments, the performance of the
architectures was
compared by using the complex robot Aibo. For these experiments, only
the
three most significant architectures were compared when evolving a
controller
for the Aibo stand up behaviour defined in chapter 4. In this task, the
controller should learn how to stand the Aibo robot up from a lying
position.
The comparison was performed based on maximal fitness, fitness speed,
and
final pose achieved by the three different controllers. Architectures
tested were
the monolithic one (a), the emergent modular (c) and the DAIR tactical
(d).
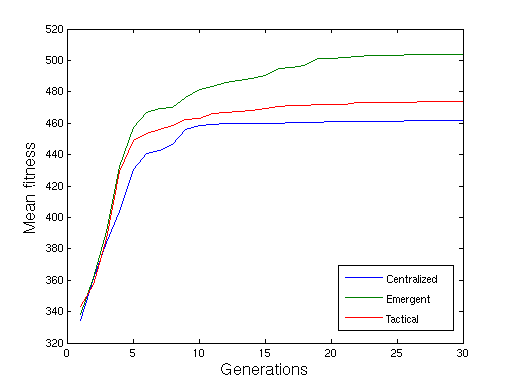
Figure 5: Comparison of the averaged fitness evolution for the three architectures in Aibo stand up behavior
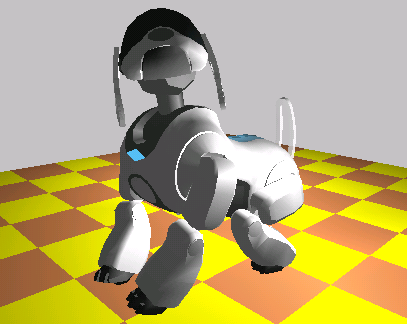
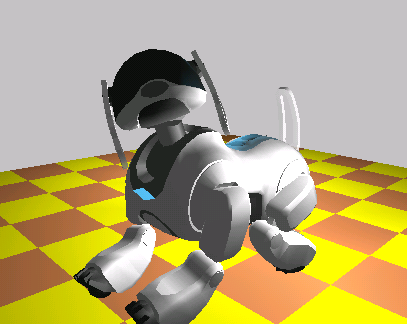
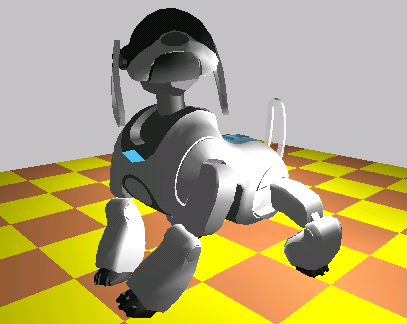
Figure 6: Final positions obtained by the best controller obtained in the ten
evolutions of each architecture. From left to right, architecture (a), (c) and (d).
Related published papers
R. Téllez and C. Angulo, Tactical modularity for evolutionary animats, in the Proceedings of the 9th International Conference of the Catalan Association for Artificial Intelligence, Perpignan, 2006