Overview
This thesis focuses on the creation of behaviours in complex robots using artificial neural networks (ANNs) as information processing elements in a distributed neurocontrol architecture. The term ”complex robot” is understood as a physical agent composed of a large number of sensors and actuators. The generation of neural controllers for these robots is a complex task due to network training, because in most cases training sets for the task at hand are not available, and even when examples are available it is still unclear as to precisely how to allocate error to the different components involved in the control of the robot for the given task.
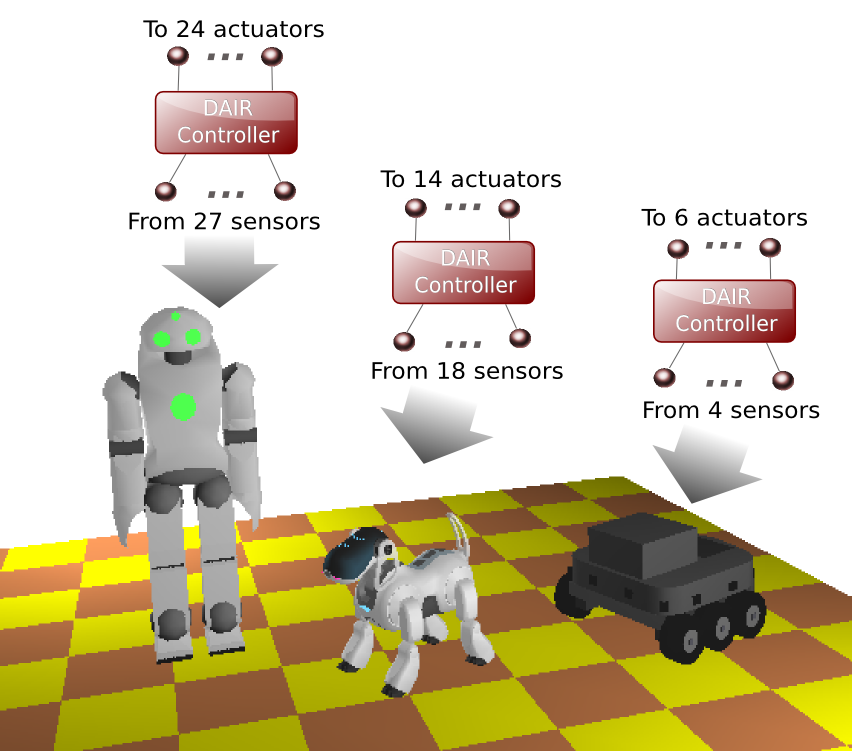
One possible approach is the use of evolutionary robotics methodology for network training. Evolutionary robotics (ER) uses evolutive algorithms for network weights updating [Nolfi and Floreano, 2000], avoiding training examples and blame assignment. The use of ER however, presents its own set of problems; it requires real interaction between the robot and its environment, and it does not scale well as the complexity of the robot and/or its behaviour grows up. This thesis will deal with these problems by developing a general distributed control architecture for robots. This architecture is based on neural networks as basic processing elements, and will be independent of the task, the environment, and the robot. The architecture is therefore proposed as a solution to the problem of generating behaviours in complex robots within the evolutionary robotics paradigm.
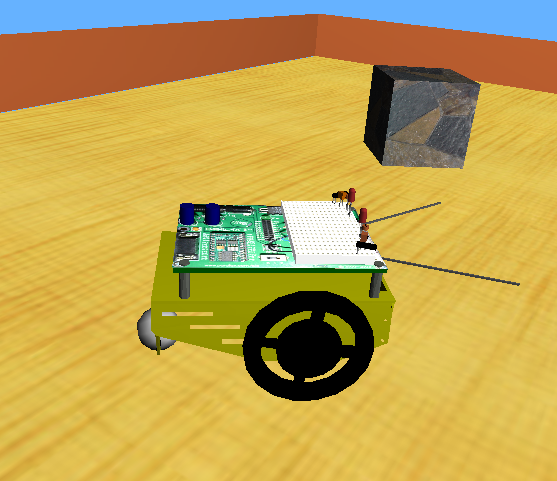
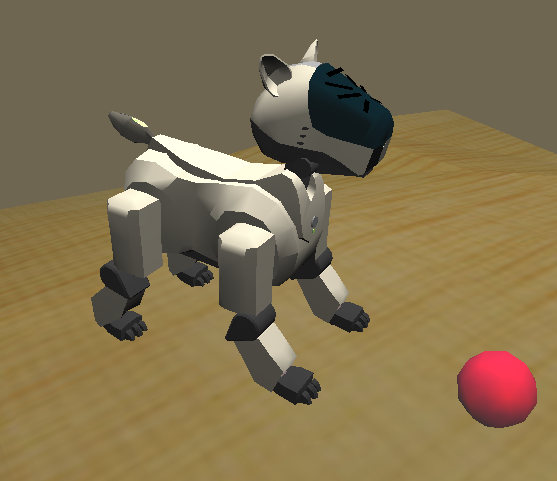
Figure 1: A simple robot (left, the Boebot) and a complex one (right, the
Aibo robot). A simple behavior to move around those robots, like for example,
a wall following behavior, implies, in the case of the Boebot robot, the evolution
of a controller for 4 devices (sensors and actuators). The same behavior for the
Aibo robot implies the evolution of a controller able to handle between 25 and
30 devices (depending on implementation).