Overview
By analyzing the distributed ensemble
of IHU’s it is observed that modules create their own communication
values for the cooperation between themselves. Furthermore, it is
observed that IHU’s always communicate the same value to their peers
when the situation that the robot is experiencing is similar, even if
the actual sensor values are different. This observation leads to a
discussion about how IHU’s manage information so that the output of the
IHU’s is taken as a meaningful internal representation of the current
situation of the robot. This internal representation has emerged
through interaction of the robot with the environment, or, otherwise
stated, the robot acquires its own semantics. Hence, what this section
basically explains is the addition of the term Internal Representation in the name
of the (DAIR) architecture.
Definitions
The state vector is defined as the vector that contains the output values of all the robot’s IHU’s at any given time. That is, for a robot controller composed of N sensors and M actuators, the state vector is defined as:
state vector(t) = (OS1(t),OS2(t), . . .
,OSN(t),OA1(t),OA2(t), . . . ,OAM(t))
The vector can be plot over a period of
time and observe how it changes in the different situations the robot
is experiencing.
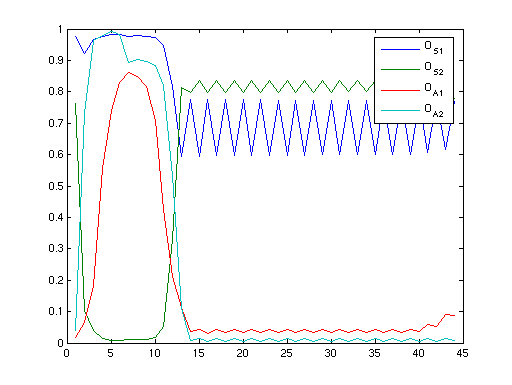
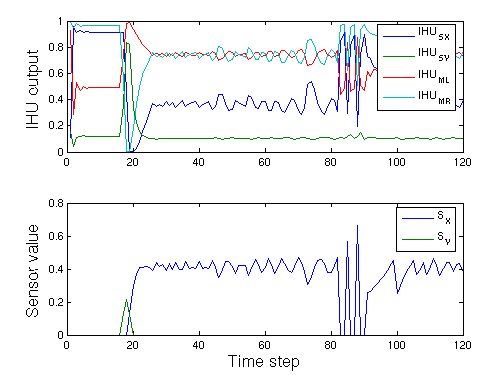
Figure 1: This plot shows a typical plot of the state vector for a
robot composed of two sensors and two actuators while performing a
given behavior
The internal
state
of the robot is defined as the instantaneous value of the
state vector
at a given time. Thus the internal state of the robot is codified as a
vector of n dimensions, where n = M +N is the number of IHU’s. The
interesting point is to observe how the internal state changes while
the robot performs its evolved task, and identify any correlation
between its behaviour and the current internal state.
The internal state actually remains
relatively stable around a set of values when the robot is involved in
similar situations. The model vector
is defined as the set of values of the state vector related to one
given internal situation.
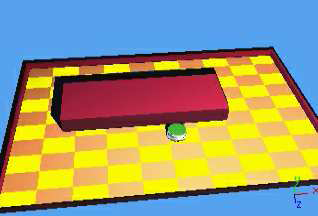
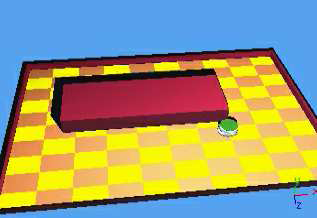
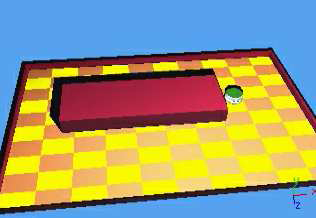
Inner analysis of the contour following behavior
The state vector trajectory for this robot during a typical operation is shown in figure 2. The robot starts in a free space with its sensors not detecting anying and it initiates a circular movement, indicated by the activation of the IHU-Ml and IHU-Mr at different power levels. The execution of this mechanism ensures that the robot will encounter an obstacle at some point on its circular trajectory; either the central object or the wall. The radius of the performed circle depends on the conditions in which the robot was evolved, basically the distance-to-obstacle at the beginning of the evolution.
   |
 |
Identified model vectors
By looking at the plot of the previous figure, four different states could be identified. However, in order to be more exhaustive, a complete analysis of the different situations the robot could experience while doing its job was performed. By doing this analysis, the model vectors were identified and extracted.| State | IHU Sx | IHU Sy | IHU Ml | IHU Mr |
| a |
0.9 |
0.12 |
0.49 |
0.96 |
| b |
0.0 |
0.99 |
0.99 |
0.0 |
| d1 |
0.775 |
0.1 |
0.55 |
0.925 |
| d2 |
0.44 |
0.1 |
0.695 |
0.765 |
| d3 |
0.135 |
0.1 |
0.825 |
0.56 |
Additionally, an automatic procedure for model vector extraction was devised, based on the use of the ARAVQ algorithm. When using this method, we obtain the following table of model vectors, very similar to the one manually obtained:
| State | IHU Sx | IHU Sy | IHU Ml | IHU Mr |
| a |
0.9 |
0.11 |
0.49 |
0.96 |
| b |
0.0 |
0.99 |
0.99 |
0.0 |
| d1 |
0.7 |
0.1 |
0.58 |
0.91 |
| d2 |
0.37 |
0.1 |
0.74 |
0.74 |
| d3 |
0.17 |
0.11 |
0.82 |
0.58 |
Inner analysis of more complex robots
A more complex robot and task were selected to observe how the state
vector behaves in such situation. The Khepera and Aibo robots
were selected while doing the garbage collector and the walking
behavior respectively. For those cases, the state vector became so complex that a manual analysis was not possible. An automatic one based on the ARAVQ algorithm was tried but found not very useful due to the fact that non-tonic states appeared (those are, states where its value is not defined by a given tonic value, but by a frequency of oscillation around a value). Due to this, just an preliminary analysis for those robots was provided.
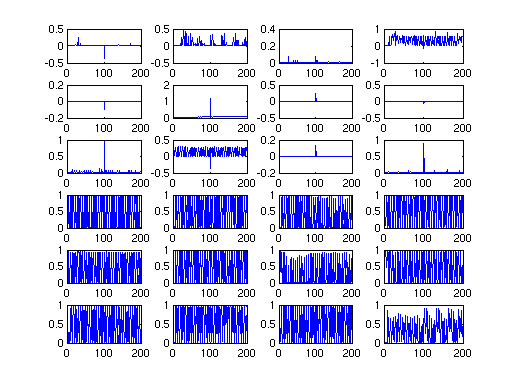
Figure 3: Aibo walking behaviour state vector.
Related published papers
C. Angulo, R. Téllez, and D. Pardo, Internal Representation of the Environment in Cognitive Robotics , International Journal of Robotics & Automation , vol. 24, issue 3, ACTA Press, 2009
R. Téllez, and C. Angulo, Embodying cognitive abilities: categorization, , in the 9th International Work-Conference on Artificial Neural Networks (IWANN'2007). Published in Lecture Notes in Computer Science, Volume 4507, p 781-788, 2007.
R. Téllez and C. Angulo, Acquisition of meaning through distributed robot control, in the Proceedings of the ICRA workshop Semantic Information in Robotics, Rome, 2007